评论
马斯克吐槽激光雷达方案错误 国产车真的走偏了吗?-百家乐凯发k8
- 作者:
- 2024-12-06 09:02
281
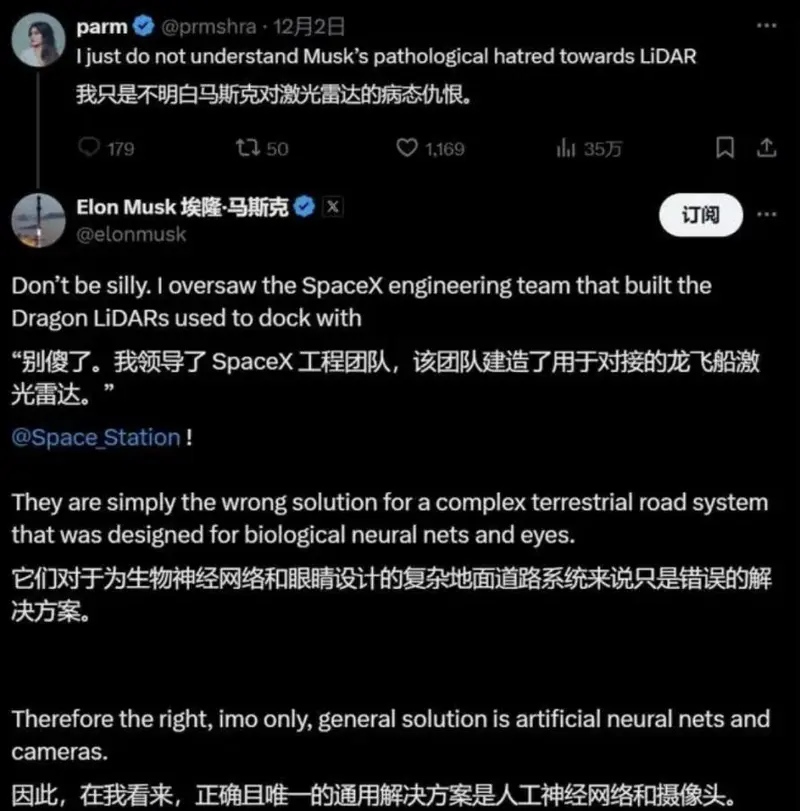
这两天,埃隆马斯克在社交媒体再一次吐槽,说激光雷达是自动驾驶中“错误的百家乐凯发k8的解决方案”,他认为在复杂的道路驾驶环境中,模拟生物神经网络和眼睛的视觉系统,才是最为有效的方式。有网友留言,说不明白为什么马斯克对于激光雷达有病态的仇恨。马斯克的回复说自己的领导的space x工程项目建造了用于对接龙飞船的激光雷达。言下之意就是说自己对激光雷达很了解,所以才不用。
现在把问题又留给自动驾驶行业,激光雷达到底该不该从车上拿掉呢?其实,从今年特别火的端到端自动驾驶概念兴起之后,国内已经有几家车企在跟进特斯拉的路线了,除了一直坚持纯视觉感知的极越,小鹏的变化较大,他们已经在新车上取消了激光雷达。不过,国内主流的厂家,比如鸿蒙系、理想、蔚来等其他新势力,目前虽然说都跟进到了端到端的技术,但依然保留了激光雷达,甚至像埃安rt、这样20万以内的车,还把激光雷达当作卖点。那么,激光雷达到底是不是摆设呢?
我们认为,利用端到端神经网络系统加上先进的ai算法,理论上可以让车辆实现跟人类老司机相同水平的驾驶能力,但目前国内可能所有智驾企业都还达到不到特斯拉fsd v12版的算法能力和大数据能力。对于国内大多数智驾公司而言,激光雷达还是不可或缺的感知硬件,对于测距、感知异形物体有不可替代的作用,在光线突然变化时作为安全冗余。
以今年进步比较神速的理想智驾为例,他们在确定端到端大模型后,当即就裁撤了很多程序工程师,改为端到端 vlm双模型系统。这里咱们简单介绍下什么是端到端,它核心就是指不再用人工制定的规则去约束智能驾驶系统,此前的自动驾驶是依靠大量工程师把现实中的场景程序化,车辆遇到类似场景去调用程序,这种方式的弊端是很难穷举所有的现实中的场景。而端到端,就是用神经网络系统,让人工智能自主学习,外界感知的信息从输入端直接到输出端,没有经过人工干预,这就是端到端。
国内目前主要的厂家虽然都宣称自己升级到了端到端,但其实在底层架构上,都保留了负责安全冗余的算法,还是融合算法。比较有意思的是,理想在端到端模式之外,还引入一套并行的vlm视觉语音模型,就是只调用纯视觉数据,去提升机器对复杂环境、交通规则的理解能力。相当于模拟人的大脑,一方面是快速反应能力,一方面是慢速的逻辑思考能力,两者交替记忆学习,让车辆越来越聪明。近期,咱们也实际体验了理想的ota 6.5.0版本,感觉进步确实非常快。
站在行业的角度看,激光雷达已经是初具规模的产业,在军用、航空航天、测绘等很多领域有重要作用,而且制造成本在不断降低,车辆保留一颗激光雷达完成可以接受,这也是更符合我们国情的方案。站在用户的角度看,如果喜欢智能驾驶,我们的建议是,就要一颗激光雷达,像用三颗激光雷达、用两颗激光雷达,都属于硬件过剩,没必要花那个冤枉钱。
内容由作者提供,不代表易车立场
猜你想看
-
2
-
-
-
1
-
活动推荐
- 奖
- 奖
- 抢
- 奖
相关车型
11.98-16.58万